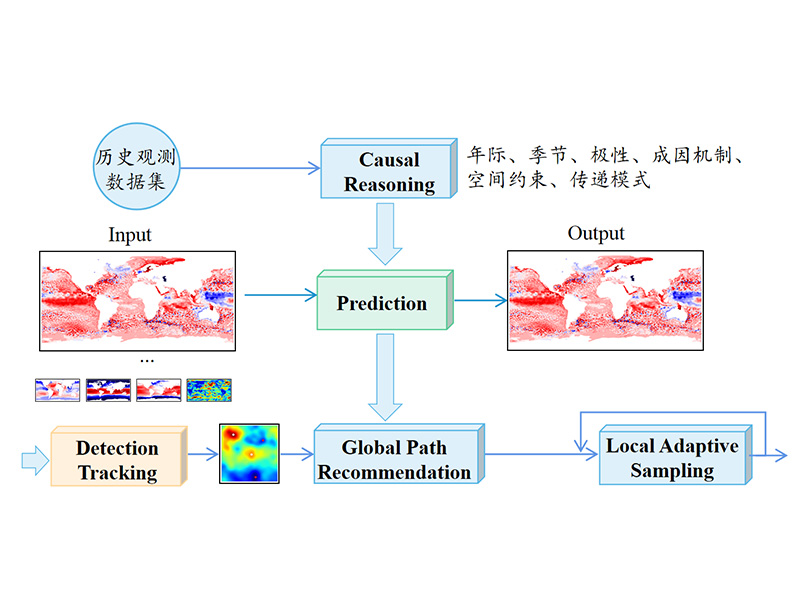



平台采用模块化、可扩展架构,依托数字仿真模型,贴合AUV、ROV、USV等海洋无人系统实操流程与信息交互逻辑。可真实模拟单台及集群设备的动力运动特性、传感器工作状态、海洋环境交互与全流程作业场景,满足人员实操仿真训练需求。
海洋无人系统仿真训练平台采用可扩展、模块化的设计思路,基于海洋无人系统(AUV、ROV、USV等)的使用流程及其实际工作中的信息流传递,结合相关人员使用操作训练需求,构建了以数字仿真模型为支撑,能够有效模拟单个/集群海洋无人系统在海洋环境中的动力学/运动学特性、传感器载荷的使用、环境信息的交互以及海洋作业过程。

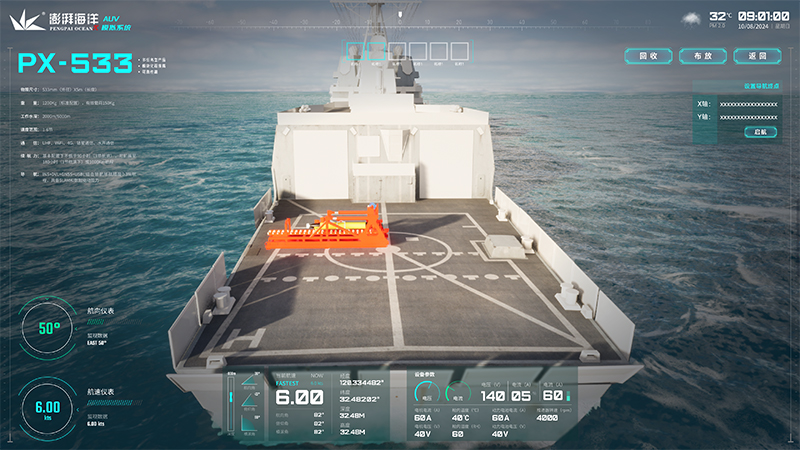
专为AUV、ROV、USV等海洋无人系统研发,支持电子海图任务配置,高度还原设备实操流程与信息传输逻辑。

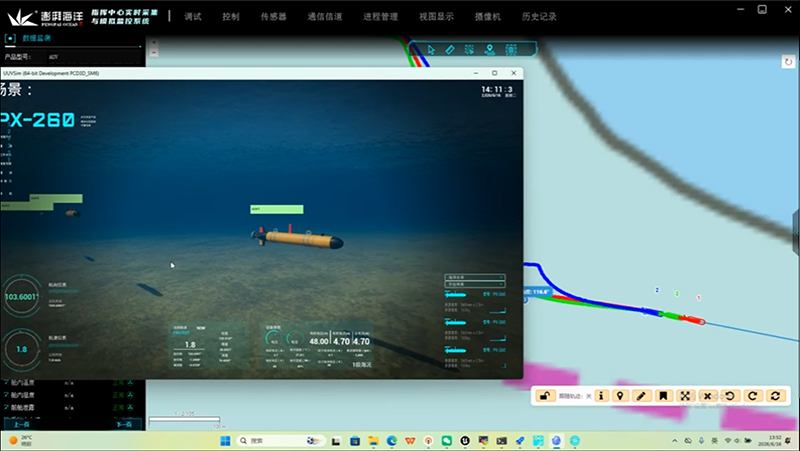
搭载完备的设备、传感器及海洋环境仿真模型,贴合真实作业工况;支持插件配置与参数调试,可灵活二次开发拓展。

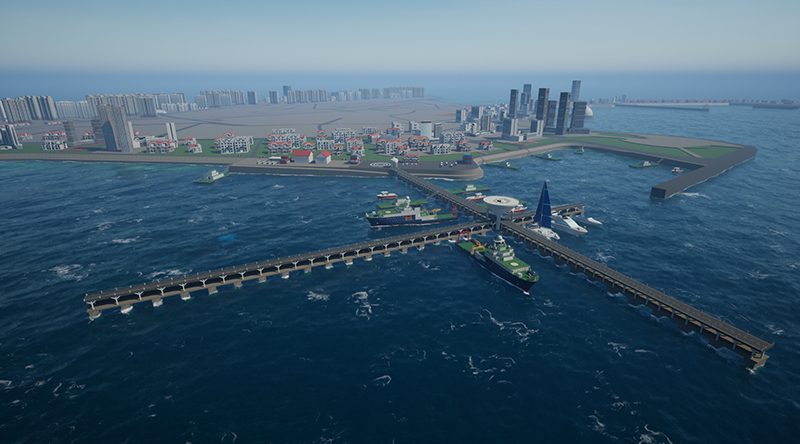
集成专业3D引擎,逼真模拟海浪、海底地形、水下雾效等海洋场景,可视化呈现设备姿态、传感器运行及探测数据。

可模拟多类无人设备集群编队、海域搜探、协同围捕等作业场景,适配集群训练需求。
教学演示
仿真训练
推演评估

赵经理

于经理

陈经理

韩经理

肖经理
版权所有 © 2026 青岛澎湃海洋探索技术有限公司-水下机器人,AUV,自主式水下航行器,ROV,ARV 鲁ICP备14123123005795号-3 青岛网站建设:汇商云创